









 The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic
The Government Circuit: Driving Resiliency and Economic Security on Both Sides of the Atlantic American Made Advocacy: Taking the Fight to Capitol Hill
American Made Advocacy: Taking the Fight to Capitol Hill Defense Speak Interpreted: SWaPing Nanosatellites for Defense Systems
Defense Speak Interpreted: SWaPing Nanosatellites for Defense SystemsA Robotic Leg, Born Without Prior Knowledge, Learns to Walk
March 13, 2019 | USC ViterbiEstimated reading time: 4 minutes
For a newborn giraffe or wildebeest, being born can be a perilous introduction to the world—predators lie in wait for an opportunity to make a meal of the herd’s weakest member. This is why many species have evolved ways for their juveniles to find their footing within minutes of birth.
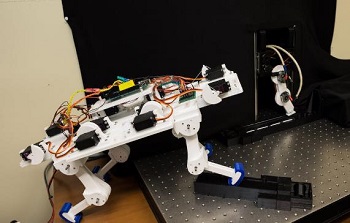
It’s an astonishing evolutionary feat that has long inspired biologists and roboticists. Now a team of USC researchers at the USC Viterbi School of Engineering believe they have become the first to create an AI-controlled robotic limb driven by animal-like tendons that can be tripped up and then recover within the time of the next footfall, a task for which the robot was never explicitly programmed to do.
Francisco J. Valero-Cuevas, a professor of Biomedical Engineering and professor of Biokinesiology & Physical Therapy at USC, in a project with USC Viterbi School of Engineering doctoral student Ali Marjaninejad and two other doctoral students—Darío Urbina-Meléndez and Brian Cohn, has developed a bio-inspired algorithm that can learn a new walking task by itself after only 5 minutes of unstructured play, and then adapt to other tasks without any additional programming.
Their article, outlined in the March cover article of Nature Machine Intelligence, opens exciting possibilities for understanding human movement and disability, creating responsive prosthetics, and robots that can interact with complex and changing environments like space exploration and search-and-rescue.
“Nowadays, it takes the equivalent of months or years of training for a robot to be ready to interact with the world, but we want to achieve the quick learning and adaptations seen in nature,” said senior author Valero-Cuevas, who also has appointments in computer science, electrical and computer engineering, aerospace and mechanical engineering and neuroscience at USC.
Marjaninejad, a doctoral candidate in the Department of Biomedical Engineering at USC, and the paper’s lead author, said this breakthrough is akin to the natural learning that happens in babies. Marjaninejad explains, the robot was first allowed to understand its environment in a process of free play (or what is known as ‘motor babbling’).
“These random movements of the leg allow the robot to build an internal map of its limb and its interactions with the environment,” said Marjaninejad.
The paper’s authors say that, unlike most current work, their robots learn-by-doing, and without any prior or parallel computer simulations to guide learning.
Marjaninejad also added this is particularly important because programmers can predict and code for multiple scenarios, but not for every possible scenario—thus pre-programmed robots are inevitably prone to failure.
“However, if you let these [new] robots learn from relevant experience, then they will eventually find a solution that, once found, will be put to use and adapted as needed. The solution may not be perfect, but will be adopted if it is good enough for the situation. Not every one of us needs or wants—or is able to spend the time and effort— to win an Olympic medal,” Marjaninejad said.
Page 1 of 2
Share on:




Suggested Items
Cicor Records Solid Growth in Q1
04/16/2024 | CicorThe Cicor Group continued to grow in the first three months of the year. Quarterly sales increased by 11.8% to CHF 107.3 million compared to the first quarter of the previous year (Q1/2023: CHF 96.0 million).
TT Electronics Awarded Contract with Kongsberg Defence and Aerospace
04/11/2024 | TT ElectronicsTT Electronics, a leading provider of global manufacturing solutions and engineered technologies, announced today that its Fairford UK business has been awarded a new contract with long-standing customer Kongsberg Defence and Aerospace (Kongsberg) for the production of complex cable harness solutions.
Cicor Successfully Completes Acquisition of TT Electronics IoT Solutions Ltd.
04/03/2024 | CicorThe Cicor Group has successfully completed the acquisition of TT Electronics IoT Solutions Ltd. with three production sites in the UK and China.
Absolute EMS Successfully Recertifies ISO 9001:2015 and AS9100 Standards
03/26/2024 | Absolute EMS, Inc.Absolute EMS, Inc., an award-winning EMS provider of turnkey contract manufacturing services, is proud to announce the successful recertification of its ISO 9001:2015 and AS9100 Rev D SAE International Aerospace Standards.
Arlon EMC Receives IPC-4101 QPL Recertification
03/20/2024 | Arlon Electronic MaterialsArlon Electronic Materials has successfully completed an intensive two-day recertification audit by IPC Validation Services that examined Arlon’s manufacturing processes and testing procedures to assure that they are in conformance to the requirements of IPC-4101E-WAM1, the Specification for Base Materials for Rigid and Multilayer Printed Boards.